
EasyConnect - the most simple way connecting UAVs, UGVs to remote locations
The fact: worldwide the automatic deployment of unmanned vehicles (UxV, especially UAVs) is dramatically increasing. All automatic operations need a reliable command & control center capable of at least
- Realtime transmitting telemetry data and livestreams to remote locations
- administrating and controlling the UxVs,
- planning, initiating, saving and distributing missions,
- receiving, displaying, saving and historicization of relevant telemetry data,
- receiving, forwarding, displaying und historicization of live streams and sensor data.
Companies can already find several solution providers offering this kind of applications basically covering all or most of the points, as cloud software or for installation on premises. The problem: When it comes to the point that a company, already running a (big, expensive third-party) command&control center e.g. for safety and security, it needs to install a separate, different product for the UAVs, UGV etc. An integration of UxV components into or with existing command & control software at security / command & control center comes always with high costs, operational issues, compatibility issues and is far of being a quick shot.
Our solution for solution providers and for Users of Third Party product:
Software adapter specifically designed to connect UAV, UGV
- to control the unmanned systems,
- to transfer telemetry data and live streams in realtime to remote locations
- to transfer and execute generated, planned missions or
- to forward actions generated by any command & control center (CCC).
Connect UxV without the need of buying, installing and integrating separate third party software suites.
Benefits:
- Connect any common Command&control center with UxVs
- Don’t bother on implementing, using the correct protocol to your UAV and/or your UGV
- Connection with standard protocols like json or MQTT to our UxV-Adapter and command the UAV, the UGV
- Communication between UXV-Adapter and the UAV, UGV is done with standard components, receivers, transceivers provided by the UxV manufacturer or using existing RF / IP communication
- Can be used for all unmanned vehicles working with Mavlink (opensource)
- UxV-adapter can be implemented on existing hardware, Raspberry Pi or equivalent
- Very fast configuration of necessary settings and IP routing – done by us before delivery
- One UxV, one Adapter – safe, secure, point-to-point, maximum flexibility
Even more benefits:
- Integration of other equipment possible – hangar, tethering, weather stations, nearly any kind of UxV sensor providing data
- As connected with standard communication links, changing the UxV-Adapter if needed, is just about updating the interfaces
- In case you are using a different protocol to json or MQTT, we enhance our translation module to your needs
To be known before delivery:
- Interface and protocol used to the legacy command & control software
- IPs data like telemetry or live stream have to be routed
- Communication link to the UxV (type, physical connection)
We will set all relevant interfaces and settings and you can use our UxV adapter without having to do anything.
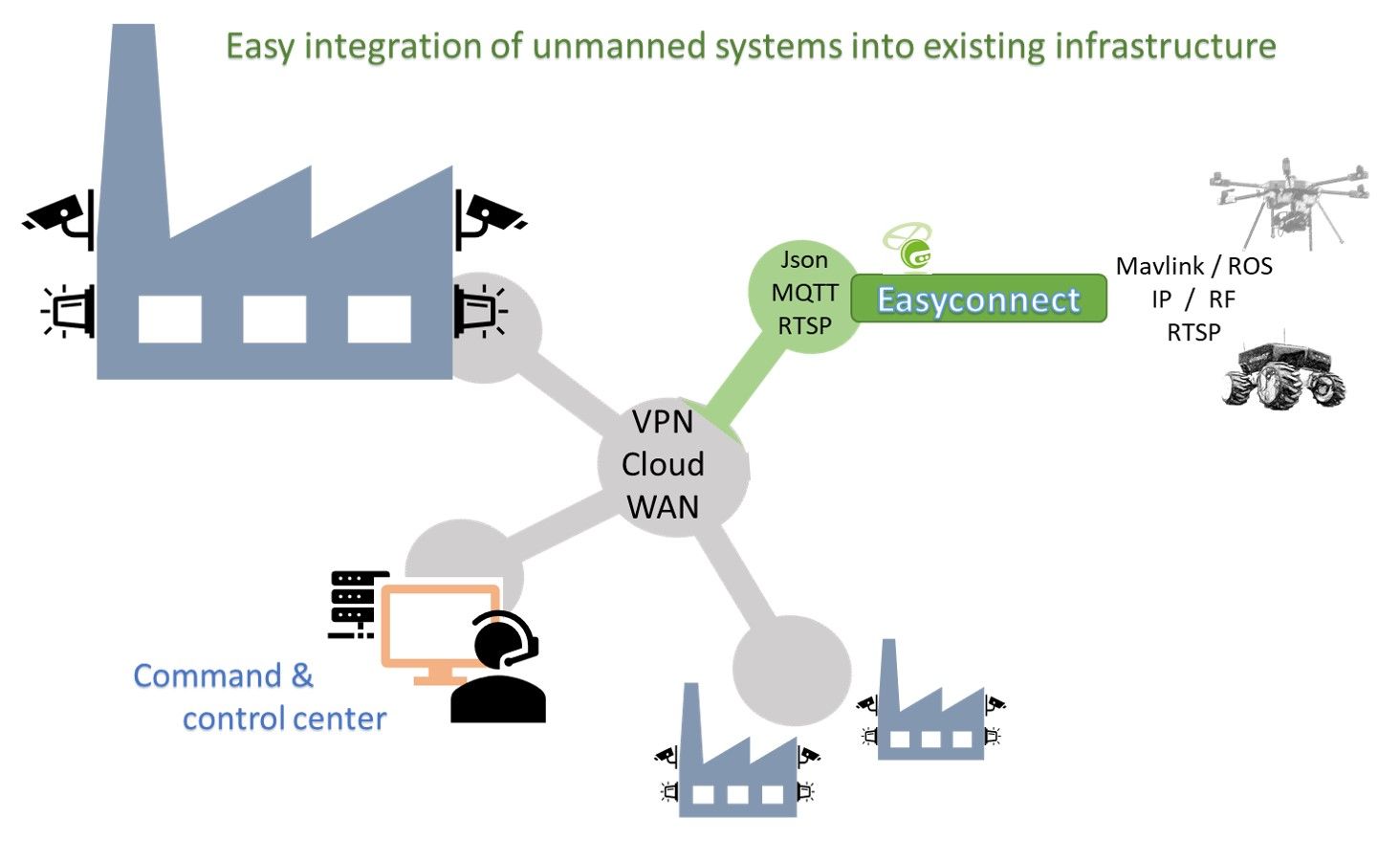
The Concept of UxV-Adapter:
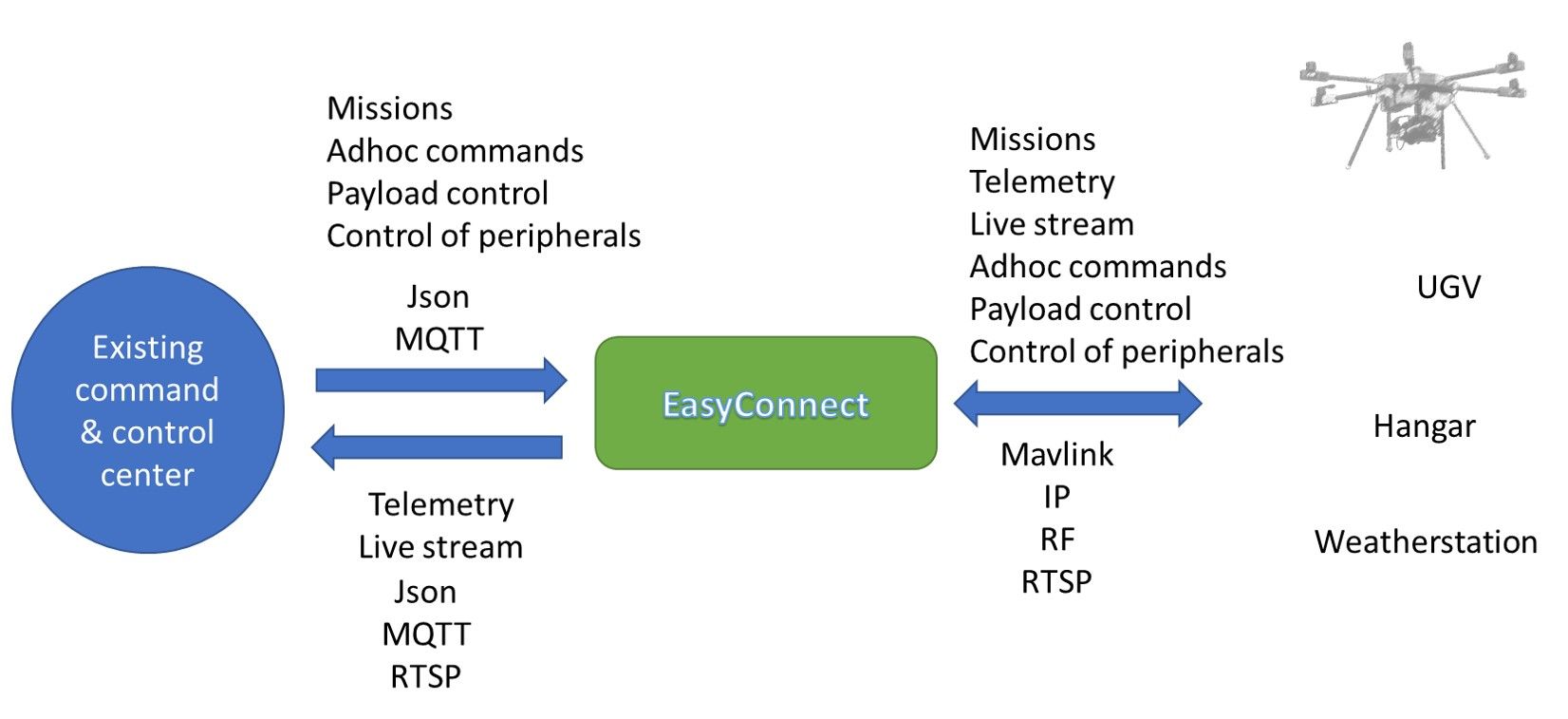
A company or command center solution provider connects the legacy software to our UxV-Adapter via its standard communication interface. The UxV administration and mission planning functionality can be implemented on their own without caring about the protocols needed for interacting with the UxV.
Capability: The UxV-Adapter can e.g. perform the following for UAVs:
- Receiving mission plan (list of waypoints with corresponding speed and heights), commands to start mission, abort, and other operational actions from the CCC.
- Loading received mission plan and commands to the UAV.
- Continuous send of the UAV telemetry data to the CCC.
- Emergency RTL or landing initiation in case of UAV route deviation from the mission plan.
- Capability of implementing secondary mission in case of swarm optimization request from CCC (secondary mission implementation during first mission execution).
- Capability of RTSP streaming through public IP or secured VPN link.
Data communication Protocols: The UxV-Adapter supports as standard the following protocols to communicate with the UxV and the CCC:
- Apache Kafka, an open-source distributed event streaming platform, is deployed using MQTT or JSON messaging to receive and send data to the CCC.
- MAVLINK, mavros, and mavproxy are used to communicate with the UAV, UGV.
Platform: The GCS operates on any Linux-based OS such as UBUNTU and raspberry Pi OS (Raspbian).
Environment and Programming language: Robot Operating System (ROS) is used as the base environment for sensors and data collection in topic publishing and subscribing. Moreover, Python3 involved as a programming language to form the main engine in detecting data stream coming from the CCC via Kafka and decrypting the MQTT/JSON messages to extract the required action. Several python codes are written to integrate with the ROS environment for controlling the UAV autonomously synchronously with the CCC.
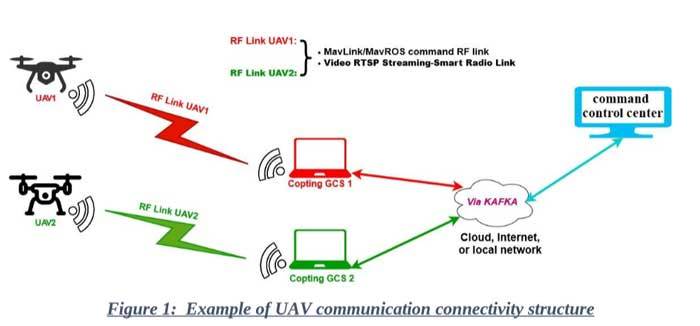
Figure 1 shows as an example two GCS controlling two UAVs via one, your command control center. This UAV control strategy based on the developed UxV-Adapter is considered as a solution to UAVs deployed in large area surveillance and patrolling tasks with aid of UAV hangar. Accordingly, UAVs which are resting, charging and standby inside the hangar placed in far area, can be released from the hangar, takeoff, start implementing a pre-planned mission, and returning back to the hangar.




